Autonomous Robot
The Project
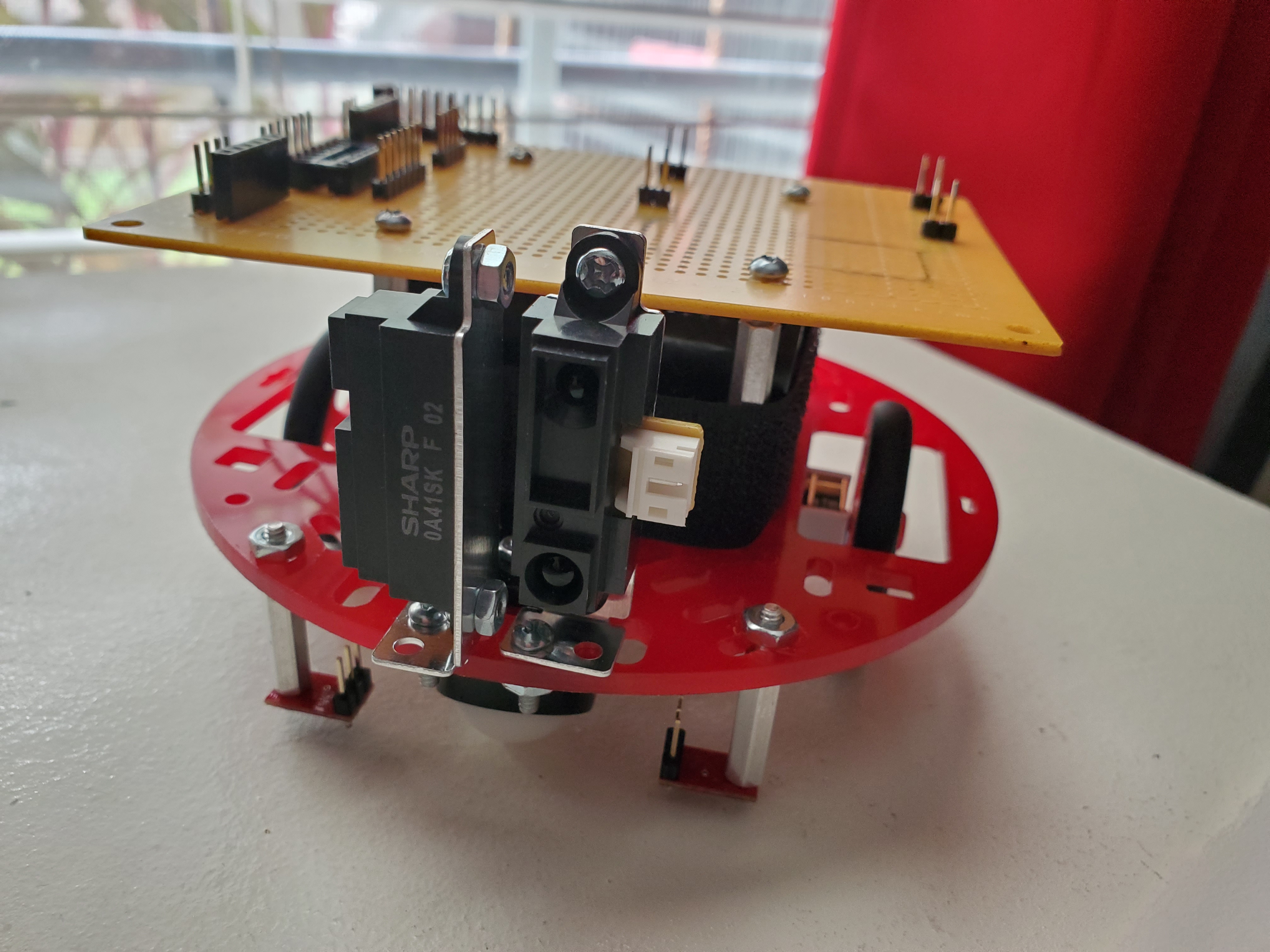
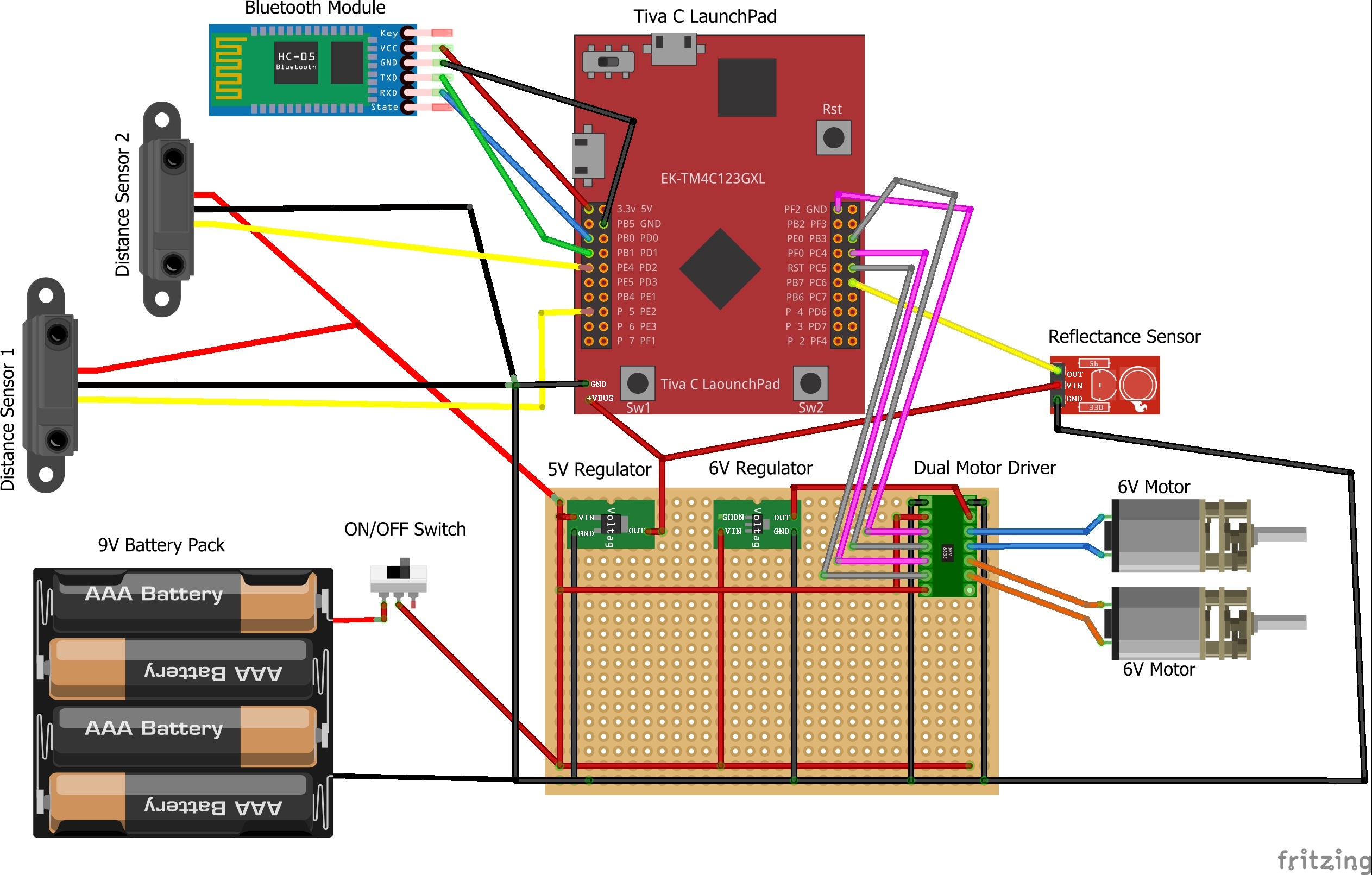
The autonomous robot project was designed to help us learn about embedded systems and software development. I was tasked to build, design and code a robot that could solve a maze and avoid obstacles using different types of electrical components. The electrical components used include: DC Motors, Distance Sensors, Bluetooth Module, and a Reflectance Sensor. I used the Tiva C EK-TM4C123GXL microcontroller from Texas Instruments as the heart of the robot. The code was written using the C language and it was debugged using Code Composer Studios the official IDE from Texas Instruments. The slide show below demonstrates the robot’s progression as it was being assembled.
The Results
After assembly and coding was finalized the robot was put to the test. Once powered ON, the robot was able to maintain its course and avoid all obstacles. This allowed the robot to solve a maze by detecting walls in its line of sight and altering its course accordingly. This process continued until the robot crossed the finish line at which point it stopped all its motor functions. The entire process was done completely autonomous. Check out code and videos for the autonomous robot, links below.